De plus en plus, les techniques mini-invasives permettent d’obtenir des résultats identiques voir supérieurs à la chirurgie conventionnelle. L’objectif obtenu de limiter les dommages musculaires.
Si ces techniques ne permettent actuellement pas de traiter l’ensemble des pathologies rachidiennes, leur champ d’application s’étend très rapidement. Elles nécessitent cependant l’utilisation de nouvelles techniques d’imagerie per-opératoire dont la plus aboutie est la technologie O-Arm®.
En neurochirurgie, et plus particulièrement en chirurgie tumorale cérébrale, la navigation est devenue indispensable. Il est certain qu’elle le deviendra tout autant en chirurgie du rachis dans les prochaines années, notamment dans les chirurgies « lourdes » comme les arthrodèsesrachidiennes, notamment effectuées par voie mini-invasive.
La machine ne met pas en place les vis, elle guide et contrôle leur positionnement par le chirurgien.
La colonne vertébrale contient la structure la plus résistante du corps humain, l’os, et des éléments parmi les plus vulnérables, la moelle épinière et les nerfs. Un point est donc particulièrement important : la sécurisation de la mise en place du matériel rachidien (vis, cages, plaques, prothèses, …).
L’utilisation de techniques mini-invasives impose ainsi l’utilisation de techniques d’imagerie de plus en plus perfectionnées, afin de compenser la diminution de la désinsertion des muscles et de la taille des cicatrices.
Lorsque les techniques d’imagerie moderne tridimensionnelle sont associées à un ordinateur, il est possible de piloter et de contrôler en temps réelle déroulement de l’intervention chirurgicale en améliorant la sécurité du patient.

Quel coût ?Les technologies d’imagerie d’acquisition 3D per opératoire de type O-Arm et la navigation 3D coutent extrêmement chers. A ce jour, moins d’une dizaine de machines est présente en France. Cet équipement est souvent complété d’une neurostimulation per opératoire.
Pour quels gestes ces techniques sont développées ?
Vis pédiculaires dorsales et lombaires:
Les vis sont mises dans la colonne vertébrale pour les unir entre elles. On parle d’ostéosynthèse.
Lorsqu’on cherche à rendre cette union pérenne, on fait une greffe osseuse. On parle alors d’arthrodèse.
Les vis sont les implants actuellement les plus utilisés en chirurgie du rachis.
Le pédicule est une structure osseuse reliant le corps vertébral antérieur à l’arc postérieur. Il s’agit d’un canal osseux rempli d’os spongieux qui se prête particulièrement bien à la mis en place de vis, de l’arrière vers l’avant.
La taille du pédicule varie en fonction de l’étage vertébral. Il est très fin dans les vertèbres dorsales et s’élargit progressivement vers les vertèbres lombaires.
Dans les scolioses, ce pédicule est souvent déformé et l’implantation de vis est alors plus complexe.

Un des risques de ce type de technique est d’entrainer une lésion neurologique en lésant la moelle épinière ou une racine nerveuse. Les lésions neurologiques peuvent parfois être définitives, avec un risque potentiel de paraplégie complète et définitive. Cette lésion peut être immédiate mais certains chirurgiens ont décrit une atteinte neurologique pouvant apparaitre plusieurs années après, si le matériel se met à bouger.
C’est la raison pour laquelle un contrôle des vis était systématiquement fait autrefois après l’intervention, au mieux avec un scanner, pour dépister ces vis mal postionnées.
Avec des systèmes d’imagerie 3D de type O-Arm, la pose des vis est fait sous guidage informatique en temps réel et le contrôle final est fait au bloc opératoire, pendant l’intervention. Toute anomalie est donc immédiatement corrigée ce qui évite de devoir opérer à nouveau le patient dans les jours qui suivent.
La « visée » des pédicules peut se faire de plusieurs manières :
• utilisation exclusive de repères osseux :
Technique dite « free hand » ou « à l’aveugle ». Aucun moyen d’imagerie ne vient guider la visée pédiculaire. Seuls des repères anatomiques sont utilisés. Une radiographie sera faite pendant ou après l’intervention pour analyser rétrospectivement la mise en place des vis. Cette technique a longtemps été celle de référence en raison des moyens limités d’imagerie per-opératoire.
Même entre les meilleures mains, le taux de vis mal mal placées peut aller jusqu’à 50% (référence littérature internationale Pubmed).
Une lésion neurologique secondaire est loin d’être systématique lorsque la vis est en position anormale mais peut apparaitre plusieurs années après l’intervention chirurgicale en cas de mobilisation des vis. Dans notre pratique, un scanner est effectué de manière systématique en post-opératoire en l’absence de contrôle per opératoire 3D O-Arm®.
• utilisation per opératoire d’une imagerie conventionnelle deux dimensions:
Un appareil d’imagerie est installé au début de l’intervention avec les champs opératoire. Il est utilisé pour contrôler en permanence la positon des instruments. Ces appareils ne sont capables que de produire une image en deux dimensions alors que la direction des vis doit être contrôlée en permanence dans les trois dimensions. C’est une limite majeure de la technique.
Un mauvais placement de la vis peut être diagnostiqué sur le contrôle scanographique post-opératoire.
• utilisation de système de surveillance électrique des nerfs et de la moelle épinière:
Ce système ne garantit pas un positionnement optimal des vis. Le courant électrique naturel ou « injecté », permet de surveiller l’intégrité des nerfs. Il ne contrôle donc pas la postions des vis et ne peut pas se subsister aux techniques d’imagerie.
Cette technologie trouve en revanche tout son intérêt dans d’autres champs d’applications, notamment dans le domaine des déformations rachidiennes où les structures neurologiques peuvent être lésées par des mécanismes d’étirement ou d’ischémie.
Ce contrôle est néanmoins obligatoire aux USA pour toute chirurgie de la colonne vertébrale, quelle qu’elle soit.
• utilisation d’une imagerie tridimensionnelle avec navigation en temps réel, assistée par ordinateur:
Il s’agit de la technologie la plus performante pour la sécurisation de la mise en place des vis pédiculaires. Cette technologie est très répandue dans de nombreux pays comme les Etats-Unis, la Suisse, l’Allemagne et s’impose progressivement dans les centres de chirurgie du rachis.
Les deux éléments qui composent ce dispositif sont :
• un système d’imagerie radiologique permettant une acquisition tridimensionnelle de la colonne vertébrale.
• un système de repérage en temps réel de la colonne vertébrale du patient et des instruments chirurgicaux.
La machine ne met pas en place les vis, elle guide leur positionnement par le chirurgien.
Quelle est la différence entre une image en deux et en trois dimensions ?
Une image en deux dimensions est celle que l’ont voit lorsqu’on n’a un seul oeil ouvert. Il est très difficile de s’en contenter car on perd tout repère de profondeur.
Un image en trois dimensions correspond à l’image que l’on voit lorsqu’on ouvre les deux yeux. Elle est beaucoup plus confortable car la profondeur permet de guider nos gestes quotidiens dans l’espace.
La caméra infrarouge qui contrôle la navigation 3D O-Arm a deux capteurs, décalés tout comme nos yeux, afin de contrôler ces trois dimensions.
Ces techniques sont utilisées depuis longtemps pour contrôler par exemple la pose d’une prothèse de genou, pour guider l’ablation d’une tumeur cérébrale, ….

Caméra infrarouge avec repère 3D fixé sur le patient 
Réflecteurs infrarouges fixés sur tous les instruments et repérés par l’ordinateur
Une acquisition tridimensionnelle du segment de la colonne vertébrale opérée est réalisée au début de l’intervention.
Tout comme nos yeux, deux caméras vont regarder en temps réel tous les instruments utilisés par le chirurgien grâce à une technologie infrarouge.
Et tout comme notre cerveau, une très puissante centrale informatique va recalculer en temps réel la position relative des instruments par rapport à la colonne vertébrale. Elle simule dynamiquement sur un écran les vertèbres avec les zones de passage des nerfs et de la moelle épinière. L’implantation de la vis est alors guidée avec une précision extrême en permettant un placement optimal des vis.
En fin d’intervention chirurgicale, un contrôle 3D est effectué afin de vérifier l’ensemble du segment opéré.
Lors d’une chirurgie de reprise, c’est à dire chez les patients déjà opérés, les repères osseux peuvent être plus difficiles à identifier. Le risque de mauvais placement des implants en est accru. L’utilisation d’un système de navigation permet de trouver la meilleure trajectoire possible des implants.
Le principale inconvénient de ce type de technologie est le coût de ce type appareil qui est de plusieurs centaines de milliers d’euros à près d’un million d’euros selon les technologies utilisées.
Plusieurs centaines de machines ce type sont d’ores et déjà en service à travers le monde mais seulement moins d’une dizaine en France. Cette technologie est sure et performante.
Vis pédiculaires cervicales :
En raison de la très de la proximité intrinsèque de la moelle épinière, des artères vertébrales irriguant le cerveau et de la très faible taille des pédicules vertébraux, l’utilisation de vis pédiculaire n’est pas aussi répandue qu’au niveau dorsal ou lombaire.
L’utilisation de techniques de navigation per opératoire permet d’élargir les options thérapeutiques disponibles en utilisant un guidage tri-dimensionnel.
Dans ce cas, l’utilisation de cette technologie constitue aussi bien un progrès en terme de sécurité pour le patient mais offre aussi un nouveau champ thérapeutique dans la prise en charge des cas complexes.
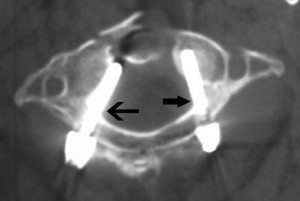
Contrôle d’une vis pédiculaire cervicale droite (à gauche de l’image) ayant un placement imparfait 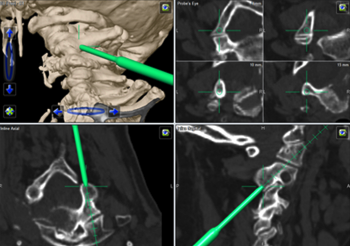
Mise en place d’une vis assistée par navigation 3D
Prothèses discales cervicales et lombaires:
Les prothèses discales cervicales et lombaires sont parfois indiquées dans certaines pathologies dégénératives cervicales et lombaires (respect impératif des recommandations de l’HAS).
L’implant remplaçant le disque doit être placé de manière extrêmement précise afin de reproduire parfaitement le fonctionnement d’un disque normal.
Un mauvais positionnement de la prothèse est une cause habituelle d’échec. La navigation et l’imagerie 3D O-Arm permettent de contrôler la position de l’implant pendant sa mise en place et à la fin de l’intervention.